Scientists have designed a reptile-inspired Mars rover that can 'swim' through sand
The movement of sandfish, a reptile native to the Sahara, has now inspired a team of researchers at the University of Würzburg to design a rover that can wander across sand and could possibly navigate the tricky Martian terrain efficiently. The lizard is adept at burrowing into the sand, and it can literally 'swim' through the desert. The researchers, led by computer scientist and professor Marco Schmidt, borrowed the animal’s locomotion mechanism and converted it into an initial technical solution. This resulted in the development of the innovative Mars rover that can outperform other models while moving on sand.
Mars’ rock-strewn, dusty surface is difficult to navigate. Since the days of Pathfinder, every meter of the Red Planet's soil has been a negotiation with terrain that can trap even the most sophisticated rovers. The fate of NASA’s rover Spirit is still fresh in memory. In 2009, the rover was trapped in soft Martian soil. NASA engineers worked hard for months to free it before accepting defeat. The stationary position the rover found itself in did not allow it to tilt its solar panels towards the Sun, and so it kept losing power through the winter of 2009 and 2010. It's fate made one thing very clear—on Mars, mobility is survival. "Conventional wheel designs are often optimized for driving at low speeds and tend to slip, sink or get stuck on soft ground," said Amenosis Lopez, a researcher working with Schmidt said, in a statement.
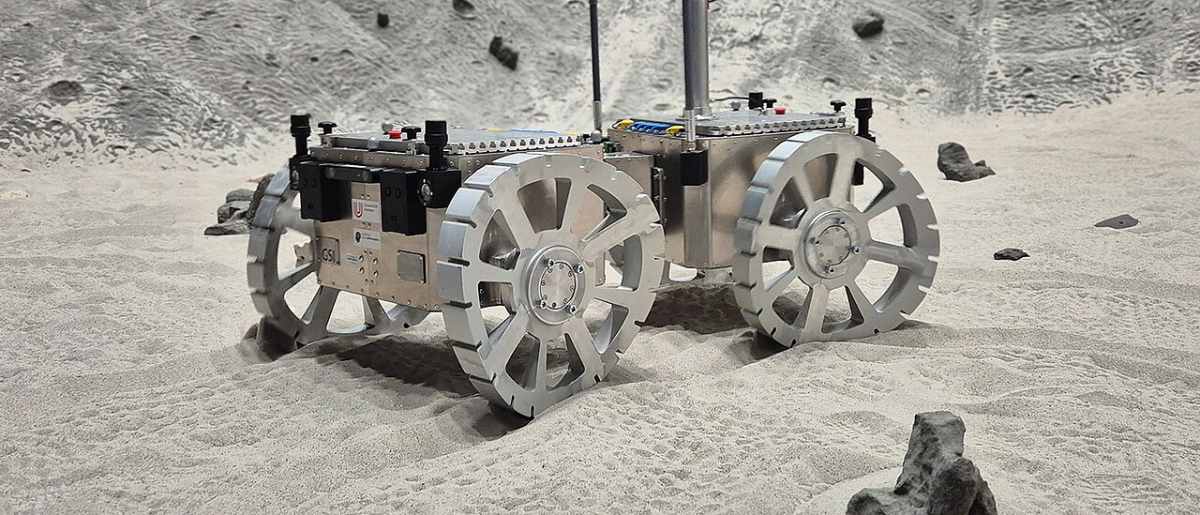
The sandfish doesn't burrow like a mole; it dives into sand, propelling itself through loose sand grains with a smooth zigzag motion to escape predators and the desert heat. What if a rover's wheels could move like a sandfish? Working with researchers from Bremen as part of the German Aerospace Center’s VaMEx initiative, the Würzburg team set out to test that idea literally. “The wheels mimic the animal’s characteristic interaction with the ground, generating both longitudinal and lateral forces. The rover leaves sinusoidal tracks in the sand—this confirms that the intended swimming mechanism has been achieved,” Lopez explained.

On sandy terrain and open-field test sites, the wheels showed promising results, with the rover moving stably on sand. That being said, it wasn't like they got it all right on the first try. "The experiments also provided us with clear pointers for improvements," said Schmidt. The first wheels were heavier and narrower than pneumatic wheels and thus exerted more pressure on the ground and caused the rover to sink. The researchers then regrouped and thought out a solution. They widened the wheels and reduced their mass. This lowered the pressure exerted on the sand. The improvements dramatically reduced slippage and enhanced stability. The researchers are now working on software to develop intelligent mobility systems that will allow the rover to understand the terrain and adapt to it better.
More on Starlust
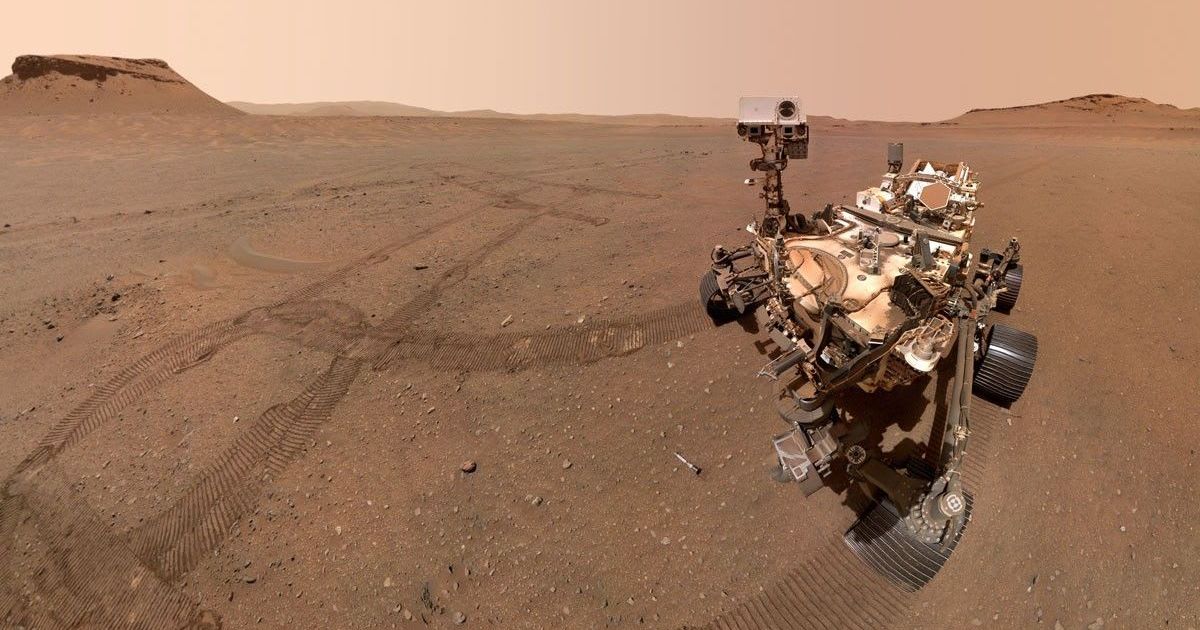
NASA's Perseverance rover sends selfie from the Martian 'Wild West' — here's why it's special