Airless, shape-shifting wheels could help explore future human habitats on the Moon

Hidden beneath the Moon’s dusty surface are deep pits and lava tubes that scientists believe could be excellent candidates for future human habitats. These underground structures offer something rare on the Moon: protection. They shield against radiation, micrometeorites, and extreme temperature swings that make surface operations so difficult. But reaching them has remained a serious challenge. A research team led by Professor Dae-Young Lee from KAIST’s Department of Aerospace Engineering believes they have found a safer solution. Their work, published on Science.org, introduces a new type of compliant, airless wheel designed specifically to handle the Moon’s harshest terrain while avoiding mechanical complexity.
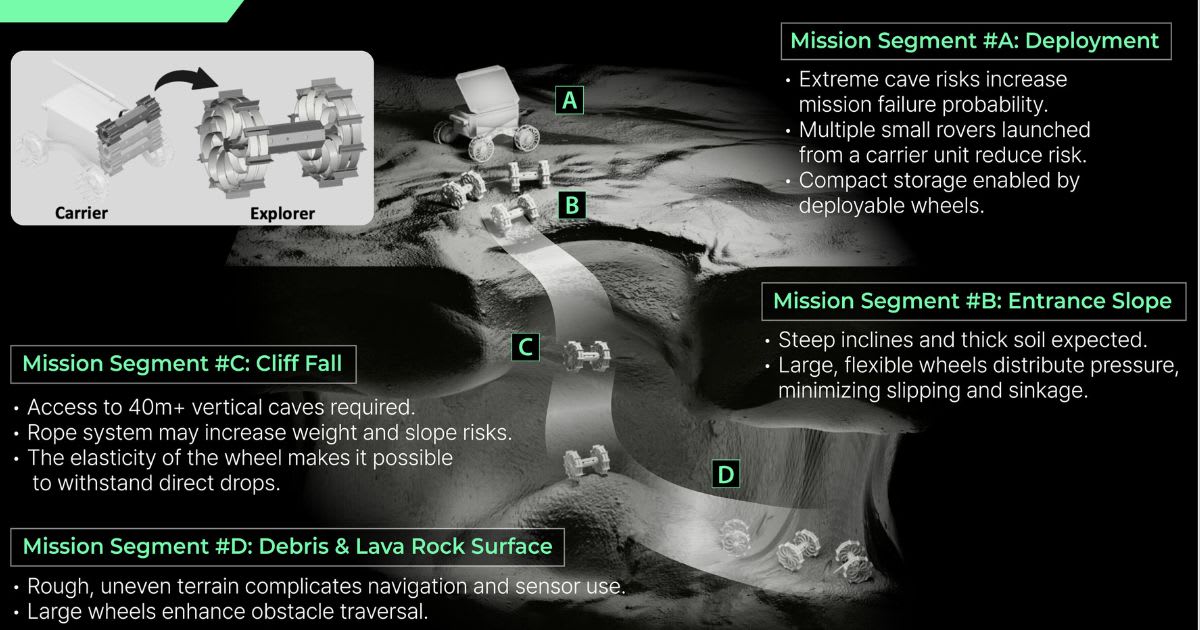
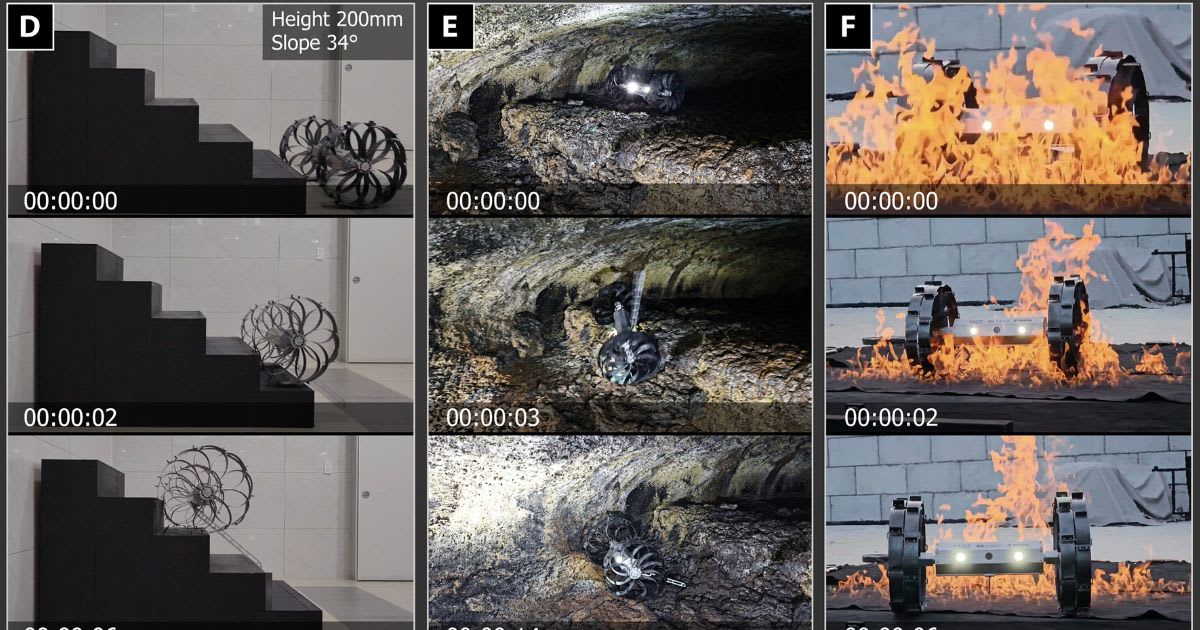
The team explains that “exploring these sites entails challenging terrain, including steep slopes along cave funnels and vertical cliffs.” Hence, it came up with a soft, deployable wheel that changes shape without hinges or inflatable components. The wheel has what the researchers call "a reconfigurable reciprocal structure" featuring strips of elastic steel arranged in a "woven helical pattern." This structure allows the wheel to change its shape seamlessly without impacting its load-bearing capacity.
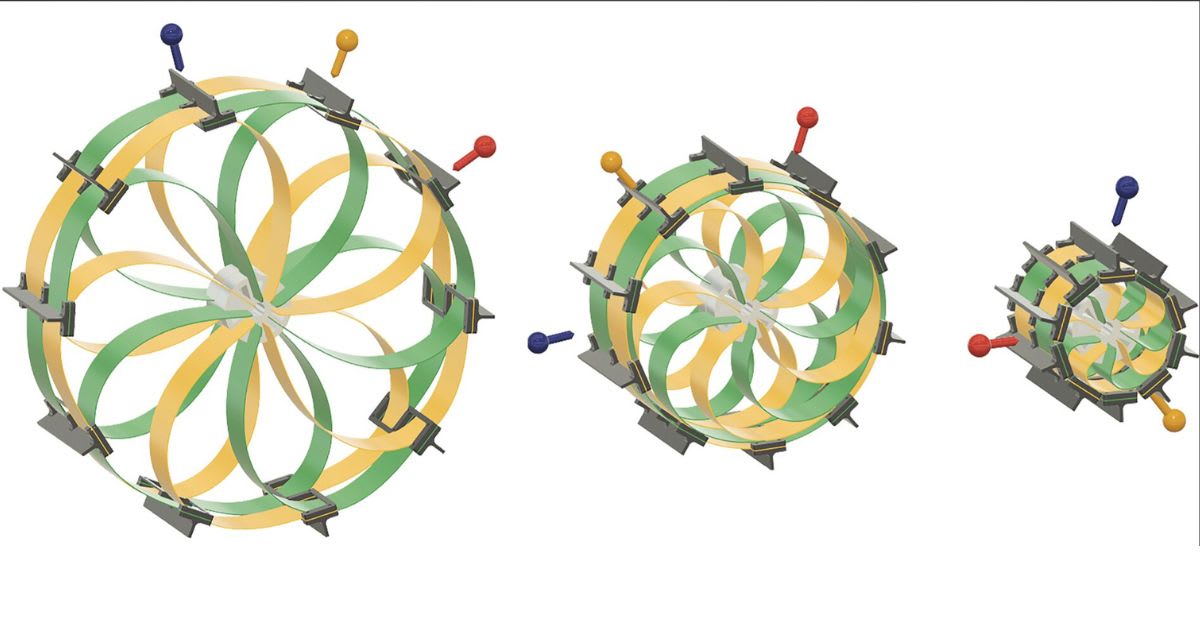
According to the study, the wheel can expand from 230 mm to 500 mm in diameter. And as the paper notes, many existing designs rely on rigid joints, but “exposed joints are often vulnerable to mechanical shocks, contamination, and environmental hazards such as sharp debris or lunar regolith.” By eliminating complex mechanical joints, the KAIST team reduces the number of parts that can fail in a place where repairs are impossible. Instead of breaking under stress, the wheel spreads it out. “By distributing strain throughout the wheel’s body, reliance on delicate mechanical components is minimized,” the researchers write. This gives the wheel an unusual combination of flexibility and strength.
Testing showed just how tough the design is. The wheel successfully crossed 200-mm obstacles, showed stable mobility on lunar simulant surfaces, and was intact after an impact equivalent to a 100-meter descent under the Moon's gravity. That last result is especially important. It suggests that future rovers equipped with these wheels could potentially be dropped directly into pits without needing rappel systems at all. Inside the pits, the benefits continue. The wheel’s elastic structure allows it to handle “sharp undulations and unpredictable rocky steps” while maintaining traction.
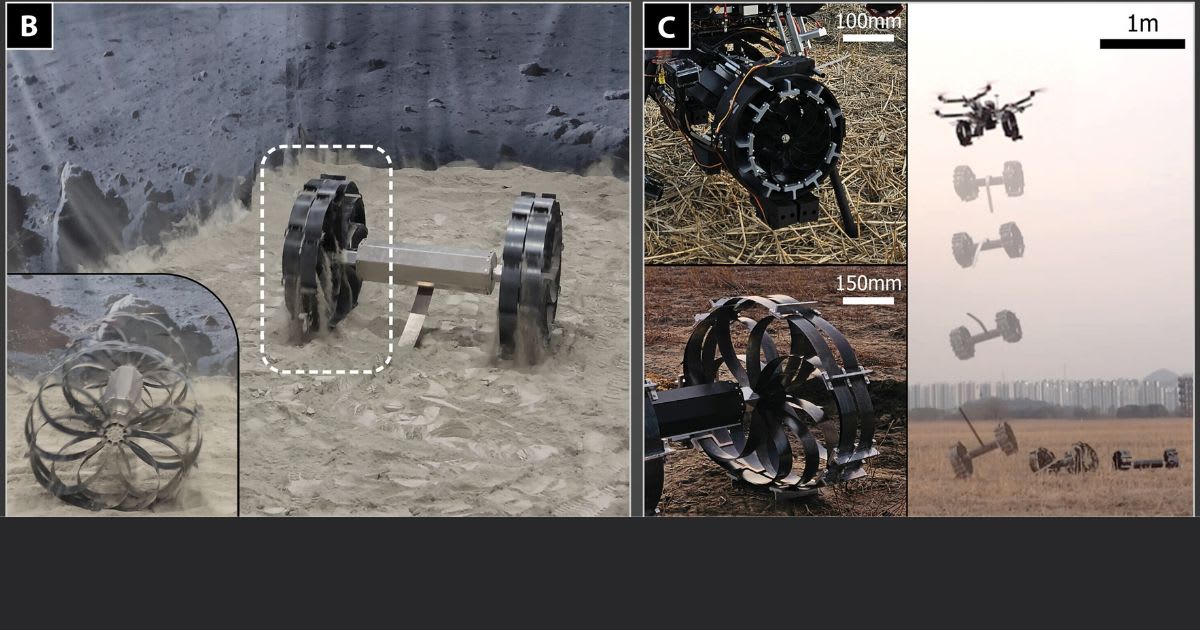
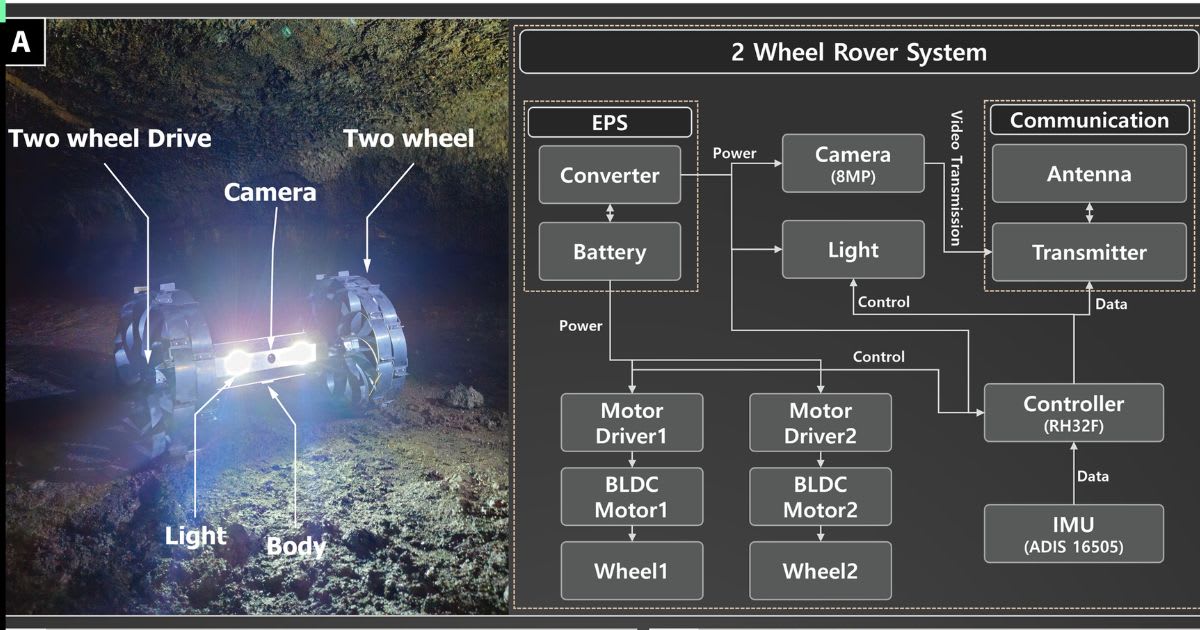
While the team's research is yet to produce a space-grade rover system, the wheel's design and adaptable nature open doors for it to be mounted on several small rovers without burdening the main rover much. "We anticipate integrating it into a space-ready microrover system and coordinating with a main rover to refine mission scenarios for actual lunar lava tube investigations," the researchers wrote.
By combining soft robotics principles with durable materials, Professor Lee’s team shows that reliability does not have to mean complexity. Sometimes, fewer parts and a smarter design are exactly what exploration demands. If adopted for future missions, this new wheel could finally unlock some of the Moon’s most protected and scientifically valuable environments, bringing humanity one step closer to living beyond Earth.
More on Starlust
NASA still unable to reestablish contact with MAVEN as spacecraft begins spinning oddly